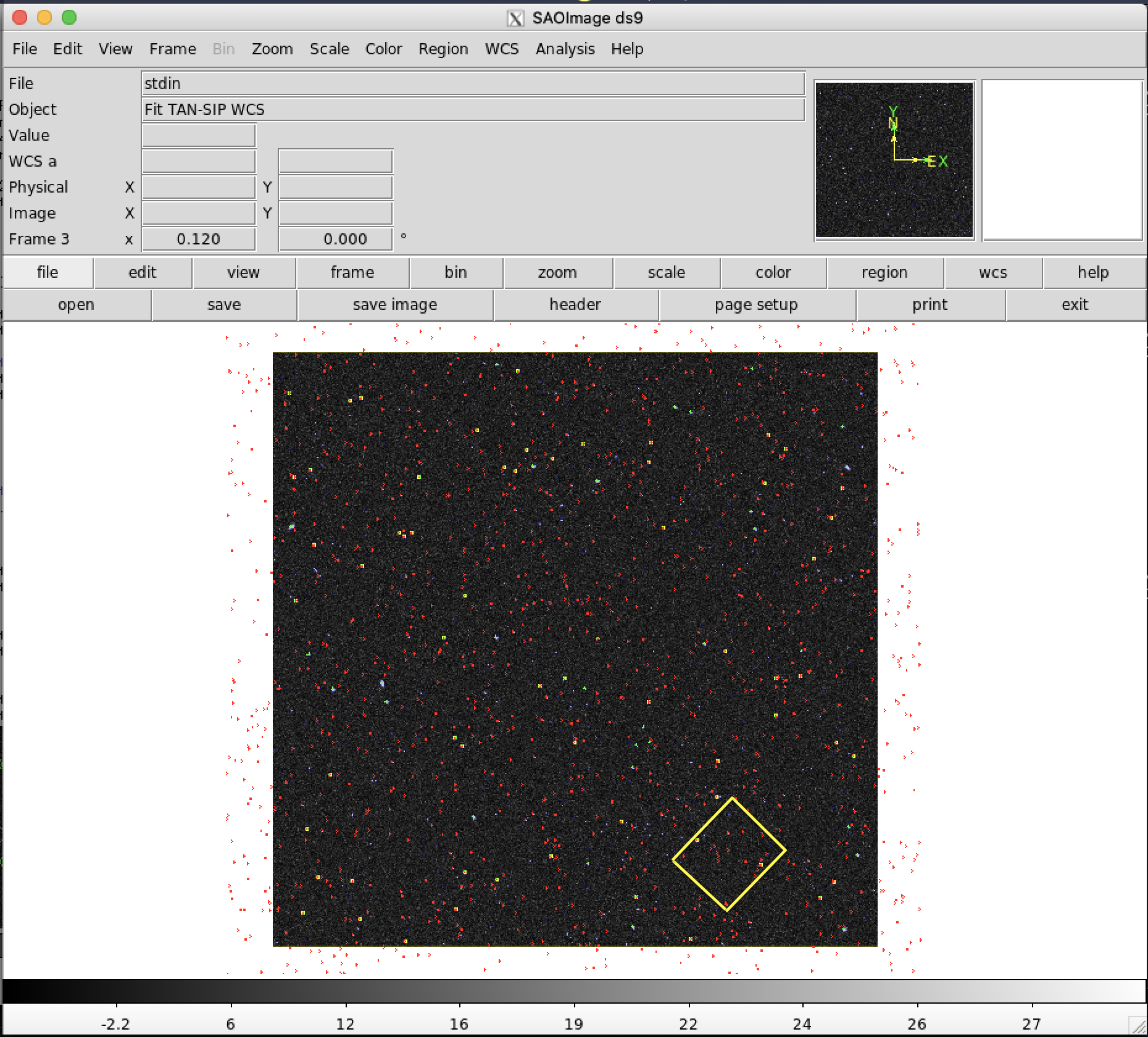
While the resolution of that image is awful, I did manage to observe that there are a lot of red (reference) sources, and most of the green (detections) have yellow (matches) counterparts. That means the matching is working, and the log line you posted agrees: 62 matches with a scatter of tens of mas indicates the solution is solid (as opposed to 4 matches with a scatter of 1 mas, or 20 matches with a scatter of 3 arcsec).
I don’t think there’s a need to worry about the large number of references that don’t have a match: the purpose of the astrometric solution performed in processCcd is to get close enough to be able to associate objects (~ hundreds of mas); downstream processing (in particular, jointcal) will refine the astrometric solution using deeper detections.
As for the particular criteria for the astrometric matching, you should check the configuration (in particular, config.calibrate.detection and config.calibrate.astrometry). E.g., for HSC I see:
# Minimum allowed signal-to-noise ratio for sources used for matching (in the flux specified by sourceFluxType); <= 0 for no limit
config.calibrate.astrometry.sourceSelector['matcher'].minSnr=40.0
config.calibrate.astrometry.sourceSelector.name='matcher'
# Threshold for footprints; exact meaning and units depend on thresholdType.
config.calibrate.detection.thresholdValue=5.0
# Include threshold relative to thresholdValue
config.calibrate.detection.includeThresholdMultiplier=1.0
# Apply magnitude limit?
config.calibrate.astrometry.referenceSelector.doMagLimit=False
# Apply signal-to-noise limit?
config.calibrate.astrometry.referenceSelector.doSignalToNoise=False